MECHE CONNECTS
The Breadth of MechE

Mechanical Engineering has expanded from its traditional areas to encompass many emerging technologies, ideas, and principles. This breadth allows our department to confront multidisciplinary challenges, while embracing the core principles that have always defined MechE... It would be impossible to showcase every facet of our work, or every contributor, but through the stories and highlights in this issue, we invite you to celebrate the breadth of MechE at MIT.
- Department Head A. John Hart.
MechE Connects Video
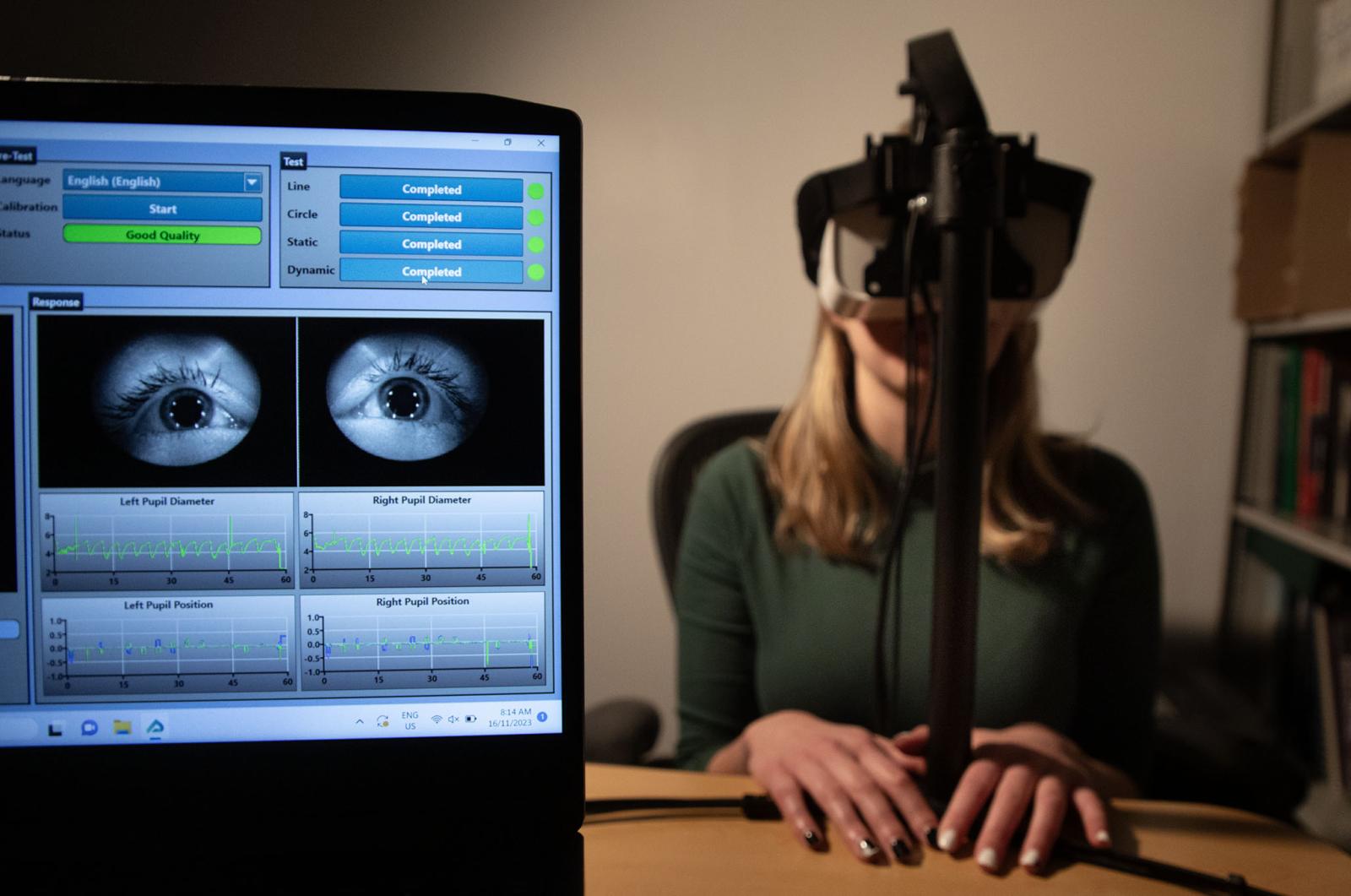
Across MechE, faculty and staff are engaging in cutting-edge research at the frontiers of mechanical engineering, with teaching and exploration at the intersection of engineering and physics, math, electronics, biology, computer science, and many other fields of study. From the nanoscale to the macroscale, across communities, climates, regions, and geographies, and from the ocean floor to the far reaches of space, there’s an incredible breadth of work underway in MechE at MIT.

This Issue's Stories







View Past Issues of MechE Connects
-

Spring 2024
-

Fall 2022
-

Fall 2021
-

Winter 2020
-

Summer 2019
-

Winter 2019
-

Summer 2018
-

Winter 2018
-

Summer 2017
-

Spring 2016
-

Fall 2015
-

Spring 2015
-

Fall 2014
-

Spring 2014
-

Fall 2013
-

Summer 2013
-

Fall 2012
-

Summer 2012
-

Fall 2011
-

Spring 2011
-

Fall 2010
-

Spring 2010